Festival of Engineering Drones 4 Good Workshop

We did another Drones4Good workshop! It's been a while, but this one was part of the UCL Festival of Engineering 2024. We did a Drones4Good workshop on 19th July and the Planet of Play exhibition on Saturday 20th July.
There were about 30 students, from two different schools, aged around 11-12 and 14-15, which did cause some problems. Next time we do this we need to make sure that we have groups of around the same ages. When I was giving the presentation I was aware that I was trying to put the more advanced topics in for the older ones, but keep it simple and fun for the younger ones.
We started off with Lima, the eBee flying wing drone and the RepMapLima project as before:

But we also had a new element where we've been using the OpenDroneMapper software to map favelas from drone flights that people have posted on YouTube.

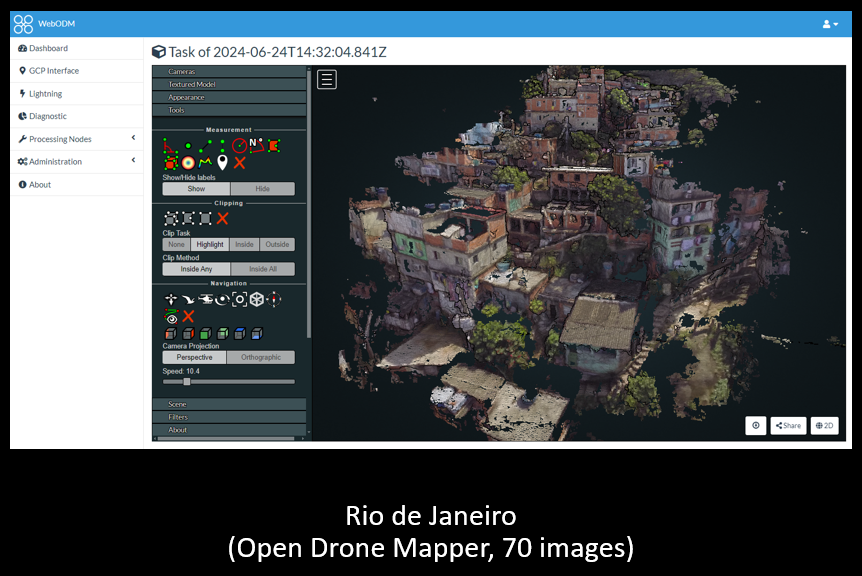
The main theme behind the Drones4Good presentation is that you don't need expensive equipment and that this type of drone technology is now cheap and available to ordinary people.
This time around the presentation contained information on NASA's Mars Ingenuity helicopter and how it works. I was hoping to demonstrate a replica Ingenuity helicopter, but it didn't get to the flying stage in time, so I had to use a Syma 107 co-axial helicopter as a substitute.
 |
| Ambitious? All the electronics works, it just needs flight testing. |
We also had a lot more Drones4Good projects to show from around the world. I'm going to write more about this in the future, but we try to limit ourselves to 30 minutes of talking and then let the students loose with the building and flying. The whole aim is to give them lots of time to build and fly, so it's a practical session rather than them having to listen to us talking.
Unfortunately, we had to use a different venue this time, as the previous location in the main UCL Quad has now become a student cafe.

That's a real shame as the basement of CEGE was perfect for us as we could do the building on one side of the room and the flying in a self contained area on the other side. This time, I booked two rooms with an interconnecting door and I don't think we really controlled the flying properly. The plan was to move the desks back in the bigger room and fly there, but we missed the seating and self contained nature of the original location where we could restrict access to the flying area, sit them on the seats and make them fly away from themselves into a sealed off area. What we ended up with was groups flying in the corners of the room, but no structure to how they were flying. What I normally do is to sit them down, show them the controls and let them fly with me watching what's happening and providing advice. Leaving them to their own devices just resulted in a lot of kids not figuring out how to do it themselves and giving up.
The other interesting thing is that we had a lot less damage than we usually see at these workshops. As far as I can tell, they only smashed a Honey Bee, two H Frames and a Dragonfly. It looks like we lost two motors, but probably from having the wires pulled off during construction.
 |
| What they left behind. I've seen far worse from other workshops. |
I saw how the Honey Bee got damaged and it was a bit of a strange one. The girl flying it was spinning it around out of control just at the point where it made contact with the wall, causing the rear of the Bee to get smashed. Normally we get damage to the front section of the frames, not the back. It did still fly with half the back section missing, though.
This is what we started off with:
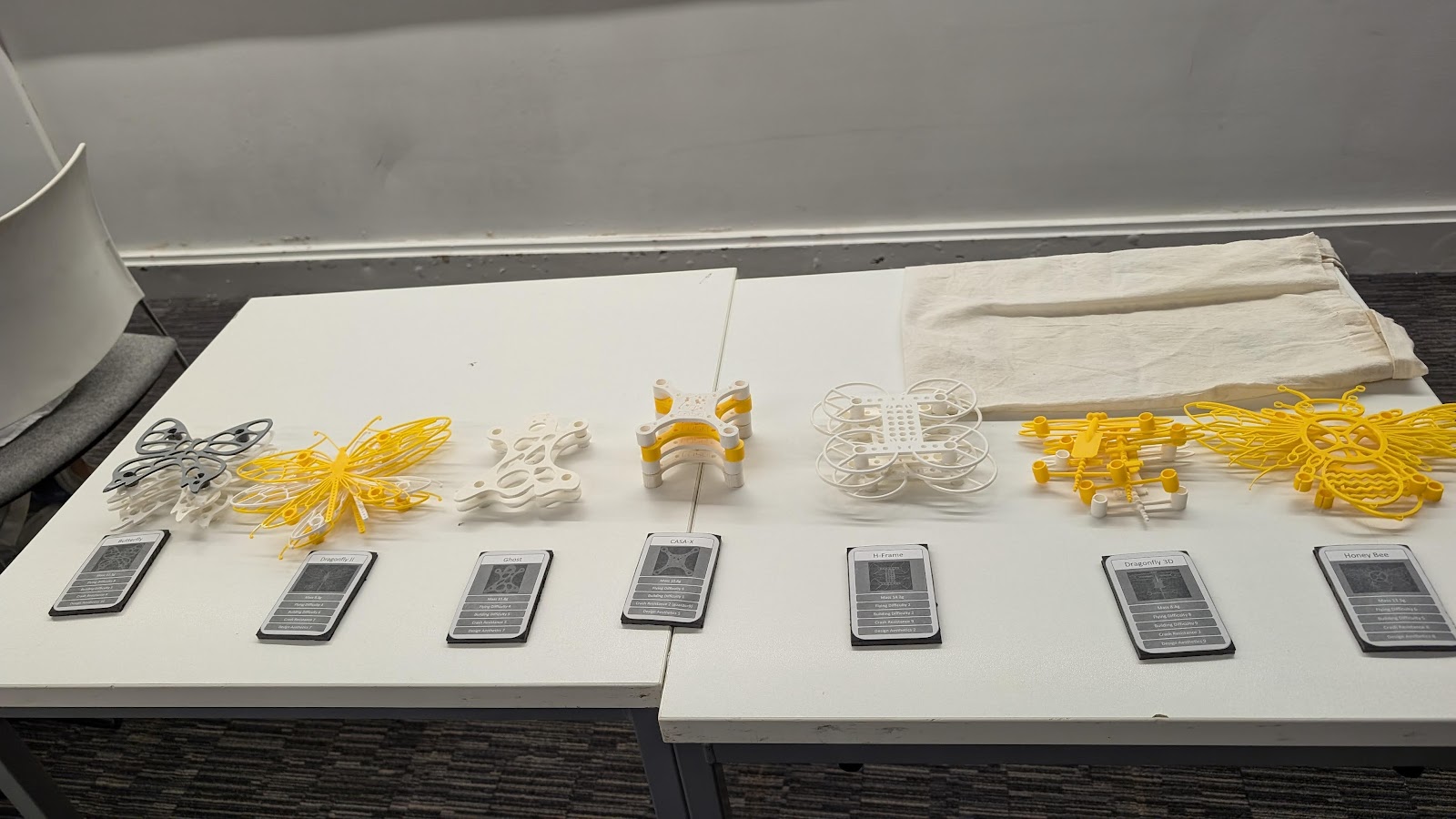
This group never really seemed to get into the flying thing in quite the same way that we've seen in the past. Certainly, during the last workshop we did at the Olympic Park in 2019, they wanted to have a fly of all the frames and see how different they are. This time they don't appear to have flown the Dragonfly3D at all and only one Butterfly got flown. The Ghosts seemed to be very popular though. Usually, the students will figure out that the CASA-X is quite easy to build and fly and has a very good performance, but they didn't seem to get flown this time.



The most successful flying was from one of the girls after we decided that their dragonfly was unrepairable and I let her have a go of my unmodified HubSan. I had a little fly first, just to make sure it was OK and to show them what you could do with one. It was at this point that I realised that there's a central pillar in the room which somebody needed to fly around. This is not just me having fun, but it shows the students what can be done with the quadcopter hardware and that there is a skill level involved. I try to show them that there's a subtlety to the control of the quadcopter and that, "bigger, harder, faster" doesn't work.
Anyway, when I gave the HubSan to the first girl in the group she managed to smash all four props off in one single crash. Impressive. That's because we were crashing into tables and chairs in the middle of the room rather than solid walls like in our previous flying location. She started to get the hang of it after that, though. The group of them were able to keep it more or less hovering in the same place, but oscillating up and down badly as they had to learn how to modulate the throttle with the height. That was some success at least, but I could see other groups out of the corner of my eye spinning H-Frames and Butterflies into the walls out of control.
I do wonder if what we're starting to see is a result of the drones market changing? When we first came up with the concept for the Drones4Good workshop, the idea was to base it around the HubSan X4 quadcopter, which was readily available online for around £30. Now they don't exist anymore, and it's difficult to find something which isn't pretending to be a DJI clone. They all have altitude lock modes and other pilot aids which make them "kiddie drones" the way the real DJI drones are. We ask at the beginning of the workshop if anybody has flown drones before. About six of them had, but there was no one who could hover any of our drones. Now they expect the full computer control and "nudge" mode that you see in a DJI. In other words, you just press the "let's fly" button, it pops 1.2m up into the air and just sits there using GPS and other sensors to remain in position. Nudge the throttle stick up a bit and it climbs. Nudge the right stick a bit and it translates left/right/forward/backward. In other words, the computer is doing the flying for you and so they don't develop the skills that you need to really pilot one themselves. Either way, I think we're going to have to build our own hardware next time we do this, as our reference architecture of the HubSan X4 is obsolete and there's no obvious replacement. That might be where the Ingenuity helicopter project helps, as it's got all the right hardware and software to make a drone out of. You never know, we might actually get the students writing their own microPython and seeing it fly the drone?
If we get to do this again, then I'm going to find a bigger space to fly in and strictly enforce the flying under supervision rule. I'm also wondering whether a bigger space would allow us to fly fixed wing for the first time? Now, that would be interesting!
A big thank you to Bin, Aude, Duncan, Soki and Bella who were our helpers this time around and who took some of the pictures posted here. We couldn't have done it without you.


Comments
Post a Comment